UWB 厘米级定位 · 姿态监测 · 6 种工作模式
基于 UWB 定位的智能自动跟随书包
刘同学 · 五年级 · 零一优创学员
100 cm
跟随距离
6 种
工作模式
UWB ±15cm
定位精度
2025 北京金鹏科技论坛 · 在评
刘同学 · 五年级 · 零一优创学员
刘同学是五年级学生,每天背着 6 公斤书包上下学。他了解到全国小学生书包平均 3.5-5 公斤,长期背负会导致脊柱侧弯、驼背、高低肩。市面上拉杆书包上下楼不方便,减重书包只减自重不减实际负担。
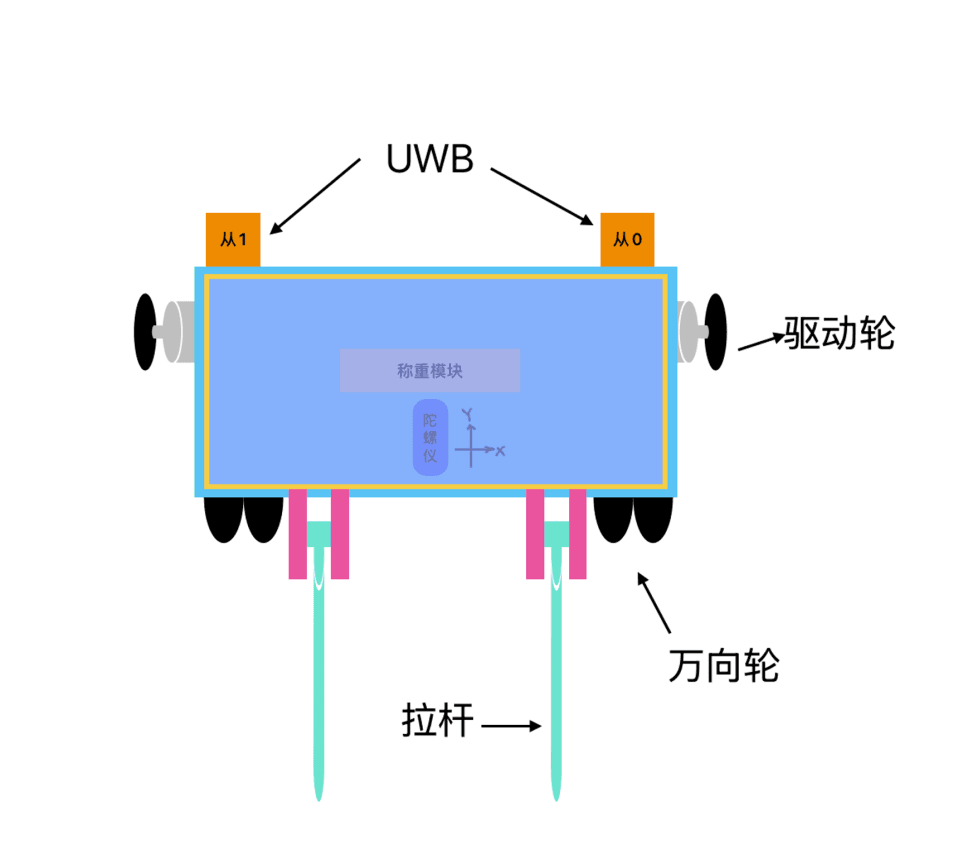
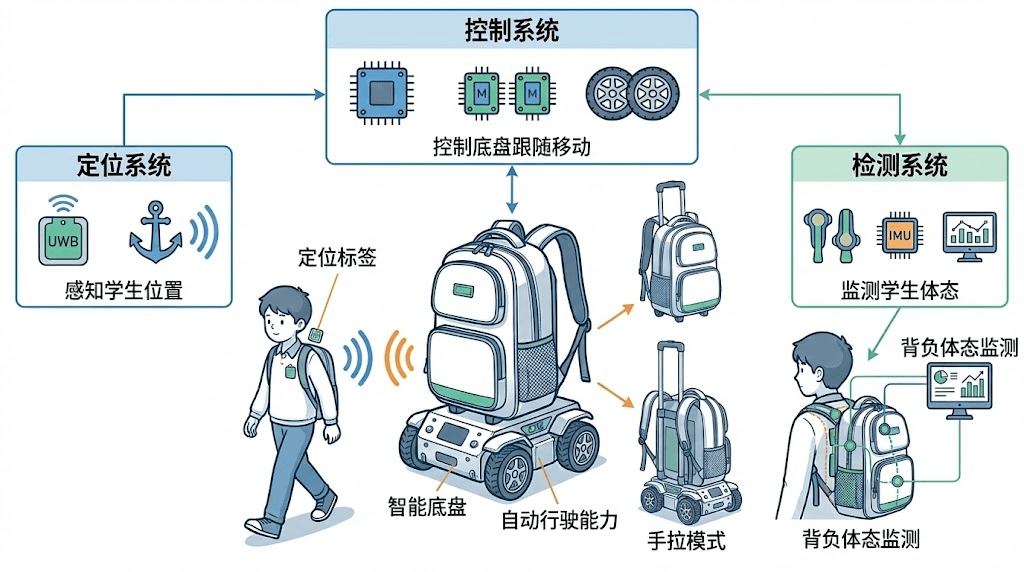
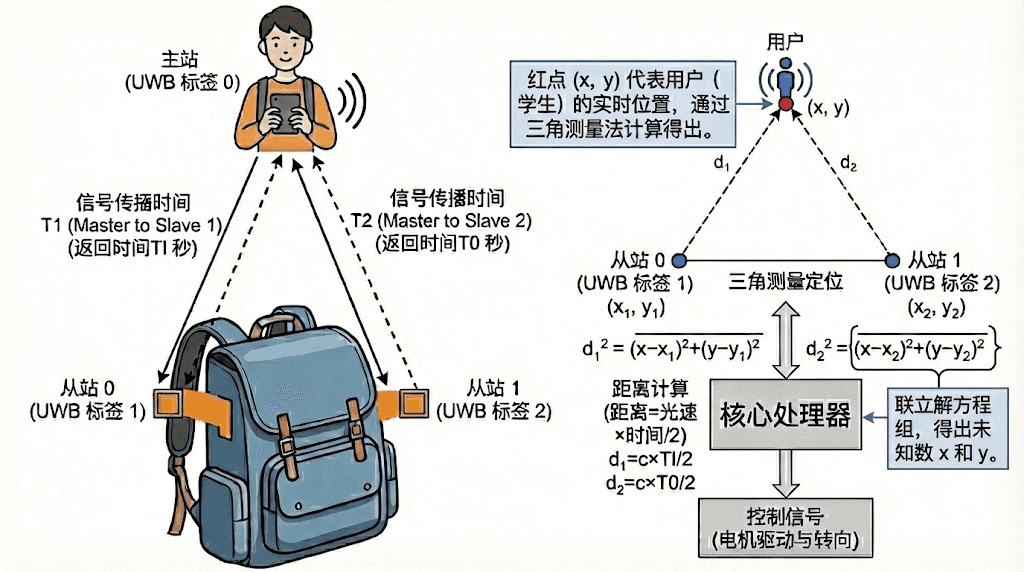
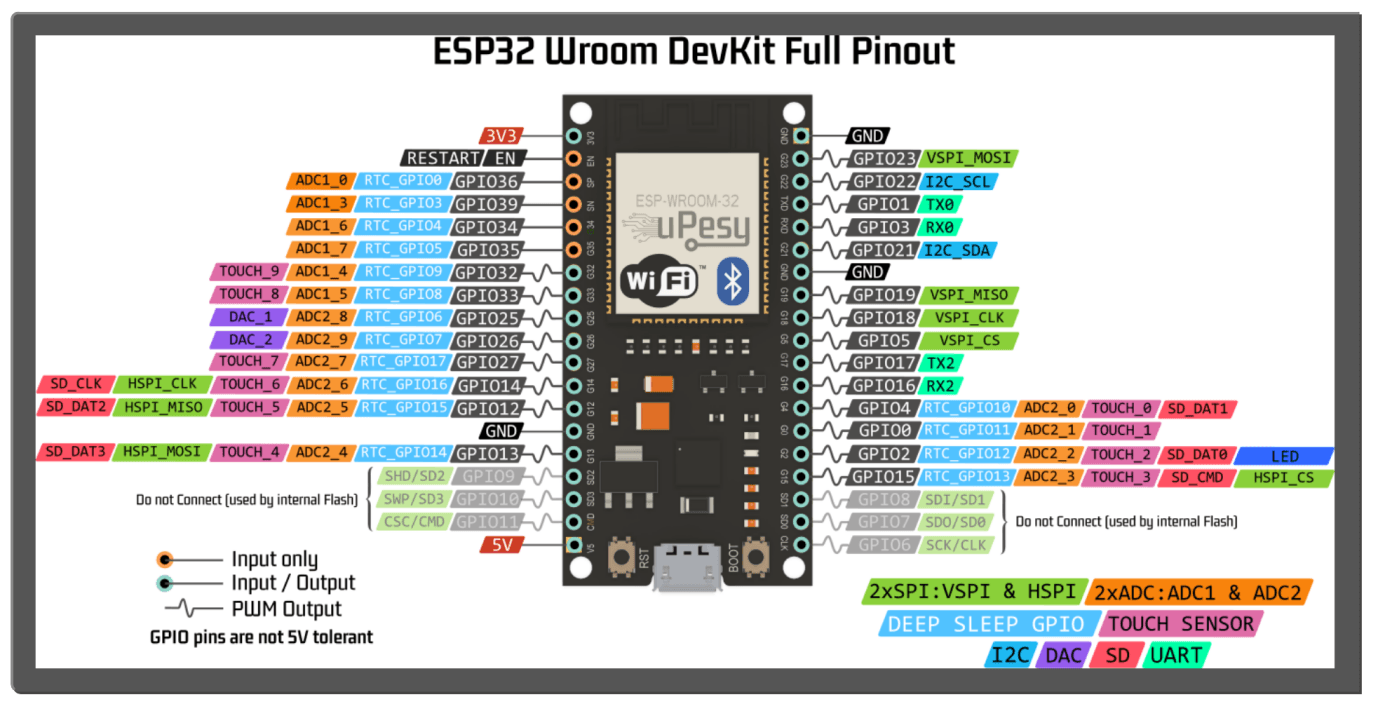
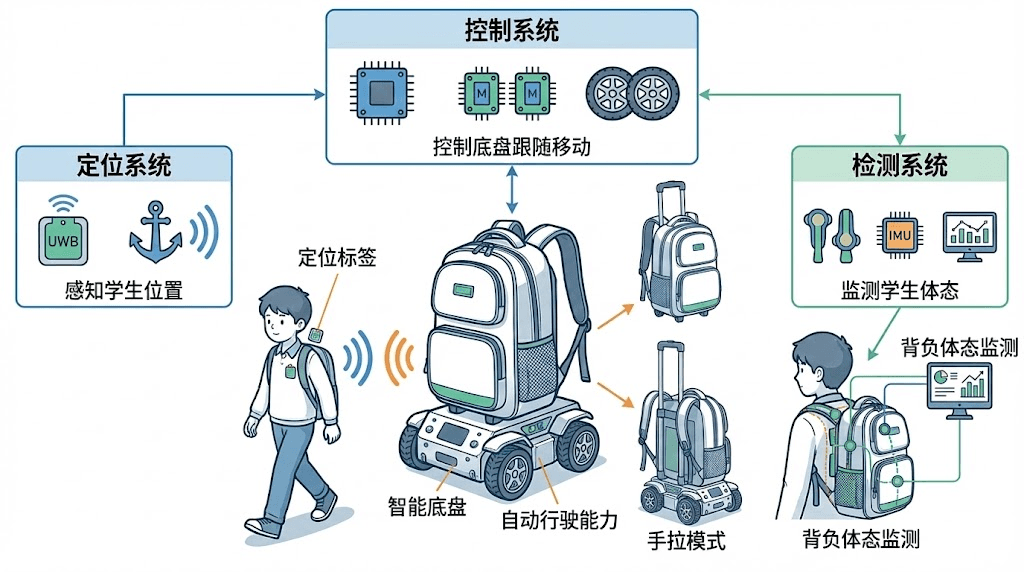
他想:能不能让书包自己跟着我走?UWB(超宽带)定位技术室内精度 10-30 厘米,刚好。他用国产硅传 MK8000 UWB 模块(比国外 DW1000 便宜 3 倍):身上别 1 个主机,书包上装 2 个从机分别测距 d0、d1,根据双从机间距 L 用勾股定理算出学生 x/y 坐标。
把"双 UWB 从机几何定位 + 姿态检测 + 6 种工作模式"装进一个书包大小的载体,五年级学生用勾股定理算坐标控制小车——把"学生背负"这个真实生活痛点做成可工程化的硬件方案。
— 项目亮点
两个 UWB 从机间距 L、分别测到主机距离 d0、d1,根据几何关系:x = (d0² - d1²)/(2L)、y = √(d0² - (x + L/2)²)。x 是学生相对书包的左右偏移,y 是学生在书包前方的距离。把这俩数喂给电机控制就能跟着走。他自己一边推导一边在草稿纸上画图,最后理解了"为什么平方差除以 2L 就是横坐标"。
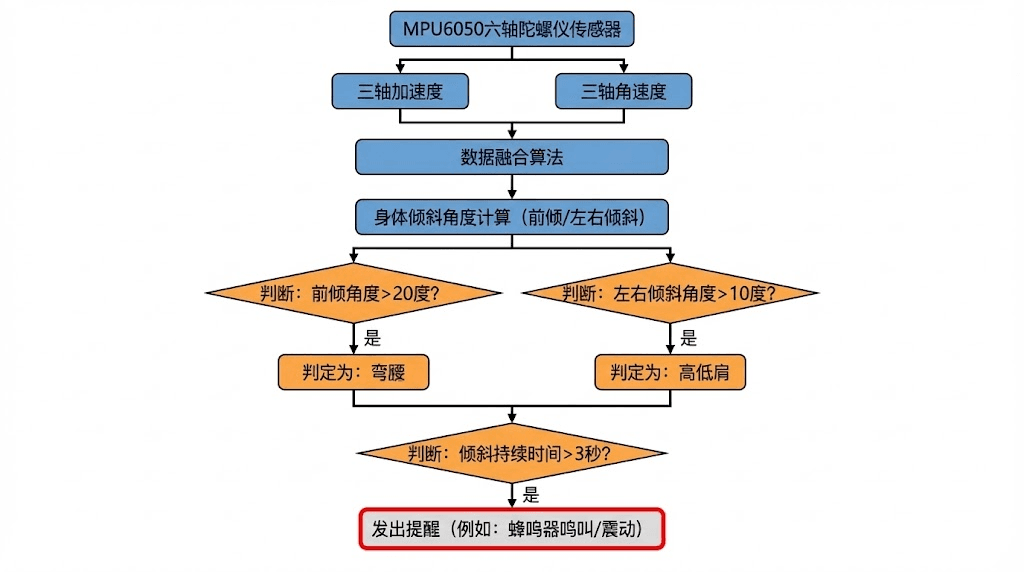
书包功能很多容易传感器互相打架。他设计了 6 种工作模式:①待机 ②背负(陀螺仪监测姿态)③自动跟随(UWB 控车)④手拉车(电机断电)⑤归位(按示教路径回固定点)⑥路径示教(蓝牙遥控录路径)。不同模式只启用相关传感器,避免干扰。
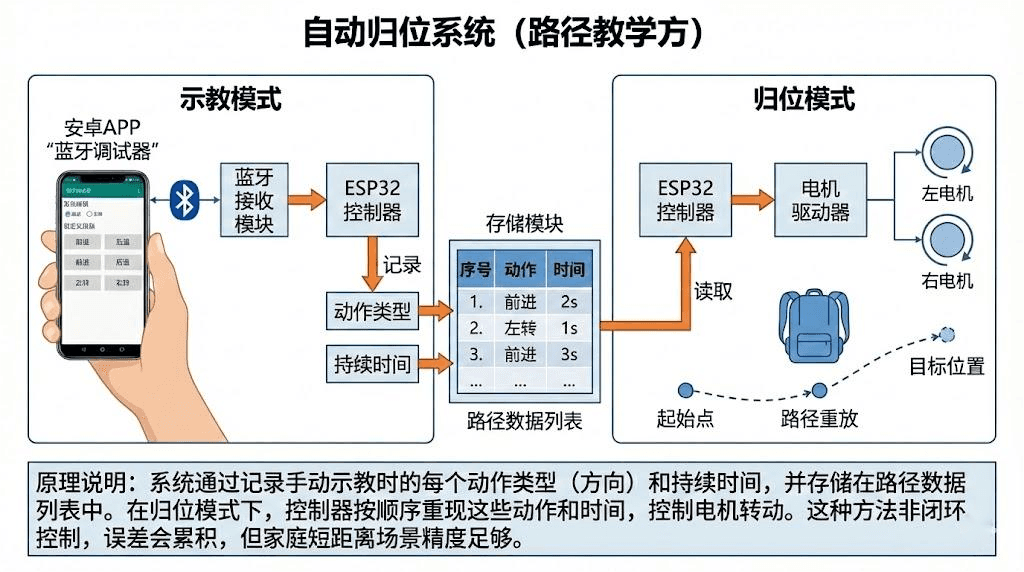
他一开始想做"扫地机器人自动回桩"那种归位方式,查了资料发现红外信标 + 视觉对接太复杂。和老师讨论后改成路径示教:用"蓝牙调试器"App 遥控走一遍路线,系统记录每步动作(前进 3 秒、左转 1.5 秒),归位时按记录回放。简单可靠。