MaixCam YOLO · 6 自由度机械臂 · Eye-in-Hand
面向养宠老人的自动拾便与垃圾抓取机器人
洪同学 · 初中 · 零一优创学员
85%+
目标识别率
80%
机械臂抓取
30 米
巡逻覆盖
2025 北京金鹏科技论坛 · 在评
洪同学 · 初中 · 零一优创学员
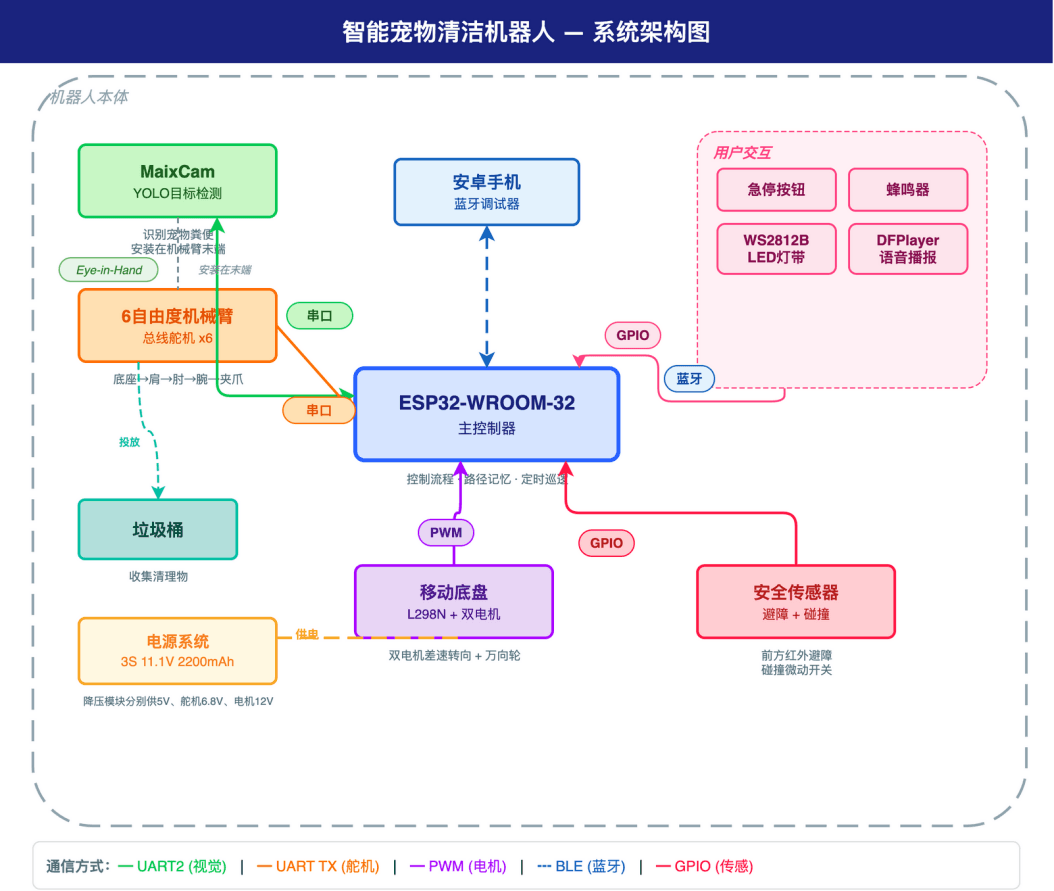
洪同学了解到我国 60 岁以上人口超 2.8 亿,许多独居老人养宠物作为陪伴,但宠物粪便和散落垃圾的清理对他们而言是个难题——弯腰困难、视力退化、体力有限。市面上要么是扫地机器人(抓不起粪便)、要么是宠物厕所(不解决散落垃圾)。他决定做一个能"识别 + 抓取 + 投放"的清洁机器人。
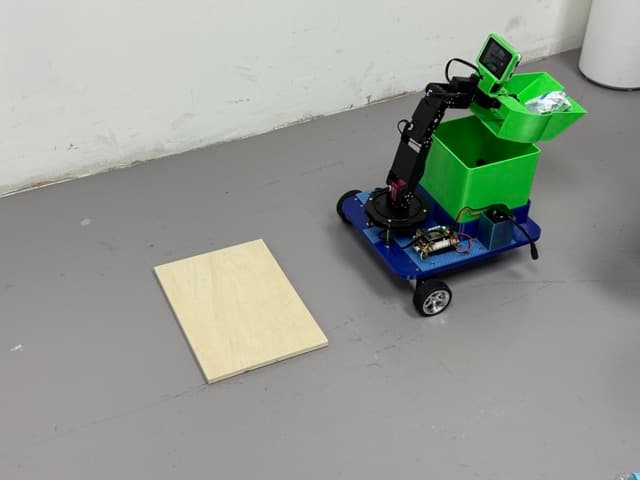
他用 MaixCam 作为视觉模块(自带 AI 加速、能本地跑 YOLO),把摄像头装在 6 自由度机械臂末端——这种"Eye-in-Hand"方案能让摄像头跟着手臂移动,多角度扫描搜索。
把"AI 视觉识别 + 机械臂抓取 + 路径示教巡逻"组合成一个老人能直接用的居家清洁机器人——MaixCam 模型自己采数据自己在 MaixHub 训练。
— 项目亮点
他在不同光照(日光灯、自然光、阴暗角落)和不同角度(正上方、45 度侧视、低角度平视)下,用 MaixCam 和手机拍了 poop(粪便)和 rab(垃圾)各 150-200 张照片,上传 MaixHub 标注、训练(输入 320×320,100-200 epoch)。初次测试发现暗光识别率低,补一批暗光数据重训后从 65% 提升到 82%。最终设置三档置信度阈值(明亮 0.55、默认 0.50、暗光 0.45)适配不同场景。
传统 PWM 舵机一个一个布线,6 个舵机要占 6 个 GPIO。他换成了众灵总线舵机——所有舵机共享一根信号线,通过 UART 发指令、用 ID 号区分。指令格式 #ID P PWM T TIME!,多舵机同步动作用花括号包裹。整个机械臂只占 ESP32 的一个 GPIO 引脚。
他用安卓"蓝牙调试器"App 给老人做了 5 个大按钮:前进、后退、左转、右转、停。老人遥控机器人走一遍清洁路线,系统把每步运动指令录成序列(最多 200 步)保存到 Flash。之后只要按定时(比如每天 10 点)自动回放,沿路径走 + 同步开 YOLO 检测,发现目标就停下抓取。