GPS + UWB 切换导航 · 磁力对接 · 低成本 1/30
面向景观湖的全域水样自动采取系统
王同学 · 六年级 · 零一优创学员
<1000 元
总成本
±2.5m / ±8cm
GPS / UWB 精度
75 分钟
续航
2025 金鹏市赛 · 西城青创赛三等奖
王同学 · 六年级 · 零一优创学员
王同学注意到很多学校都有景观湖,但季节变化时水质会"翻绿"、发臭,影响生态和环境美观。要治理就要先检测,传统方法是工作人员在湖边提一桶水——但校园湖是静水,局部水样不能代表全湖。商用自动采样船动辄几万到几十万,学校用太奢侈。
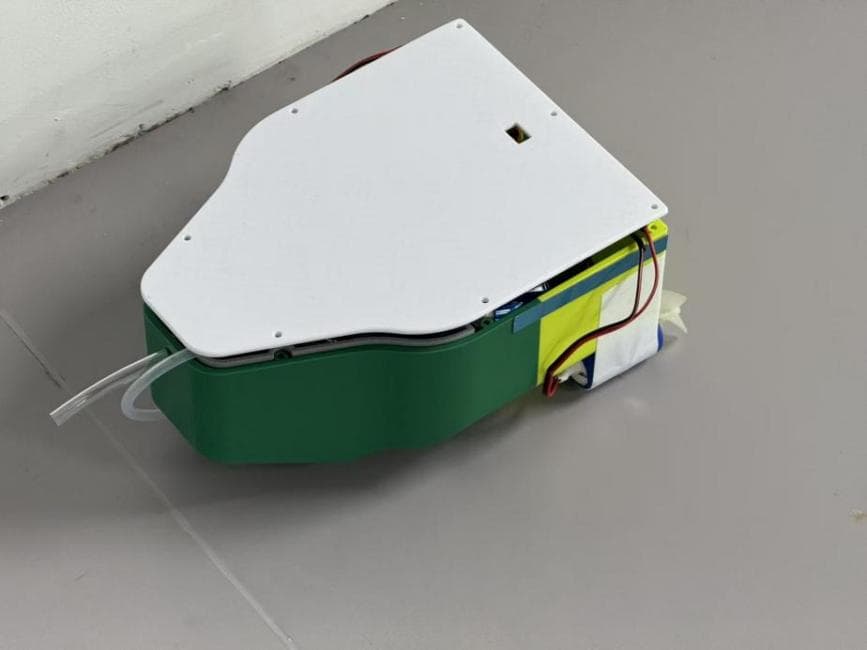
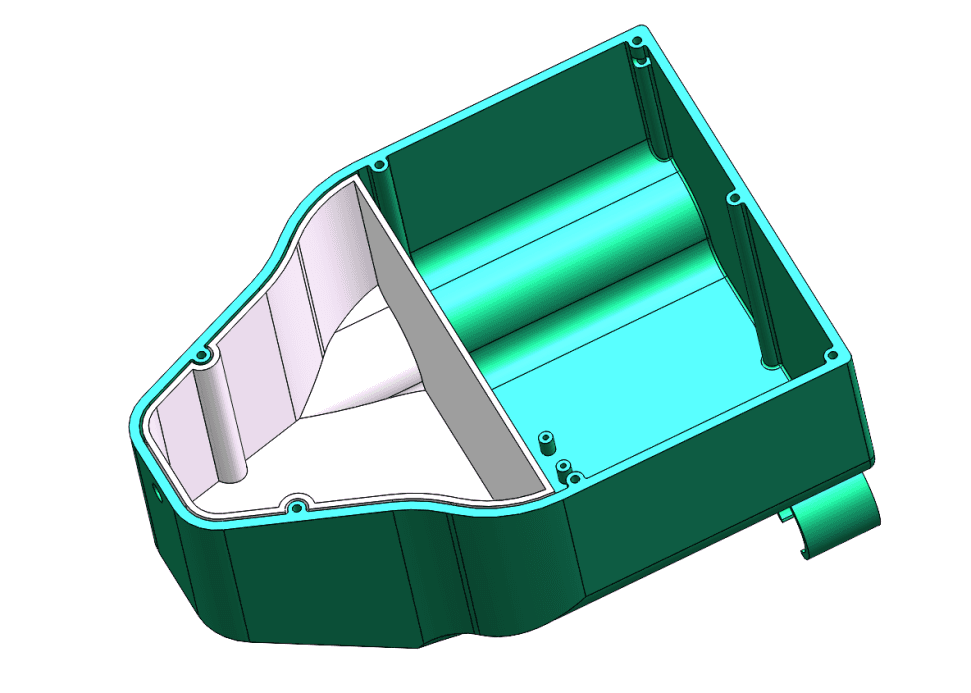
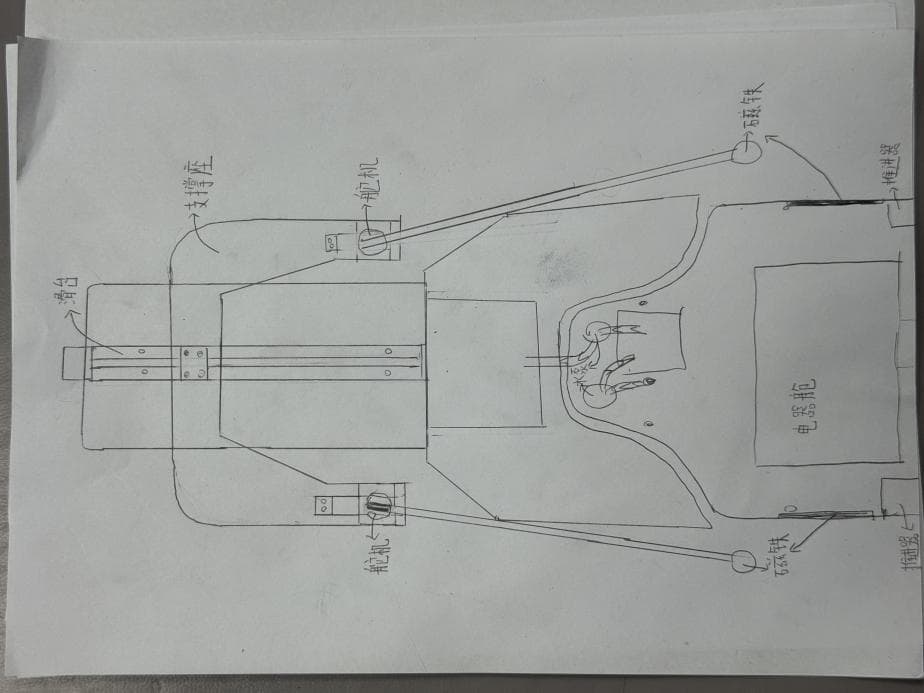
他设计了一套低成本系统:3D 打印船体(250×150×80mm、1.5kg)带双推进器、12V 水泵、500mL 水样罐,分别用 GPS(远距离)和 UWB(近距离对接)导航。基站负责接船 + 储水。
用"远 GPS + 近 UWB"两段式导航把对接成功率做到 80-90%,磁铁代替机械爪、丝杆把船拖上岸——把工业级水域采样船的核心功能做成 1/30 的成本,适用于校园景观湖。
— 项目亮点
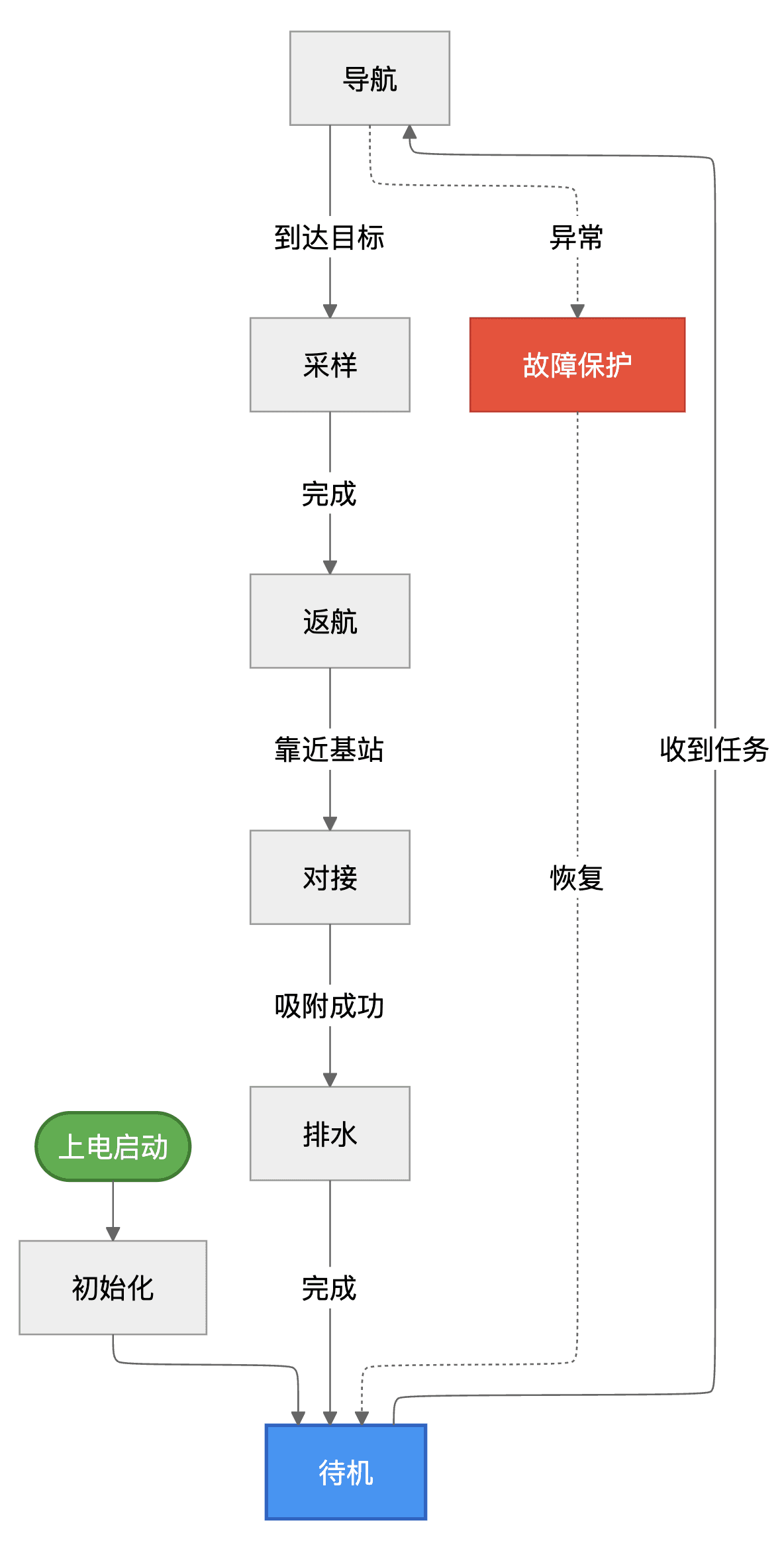
GPS 室外精度 ±2.5m 远距离够用但靠近基站时偏差太大会撞偏。UWB 厘米级但通信距离只有 5-10m。他设计了切换逻辑:船去采样点远距离 GPS 导航 + 罗盘修正航向,回基站到 5m 内自动切到 UWB,靠 ±8cm 精度对准基站磁力夹爪。两段式让对接成功率从 50% 提升到 80-90%。
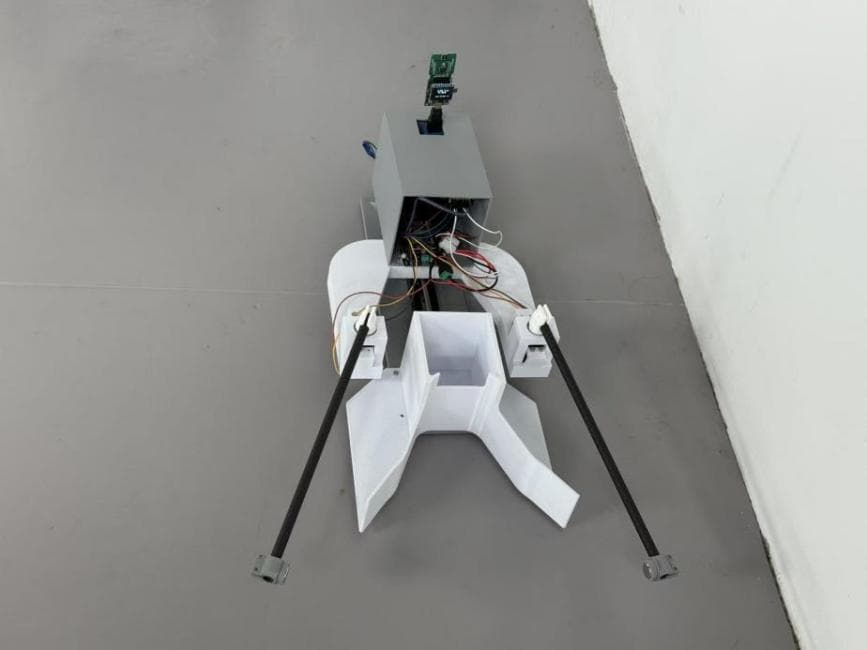
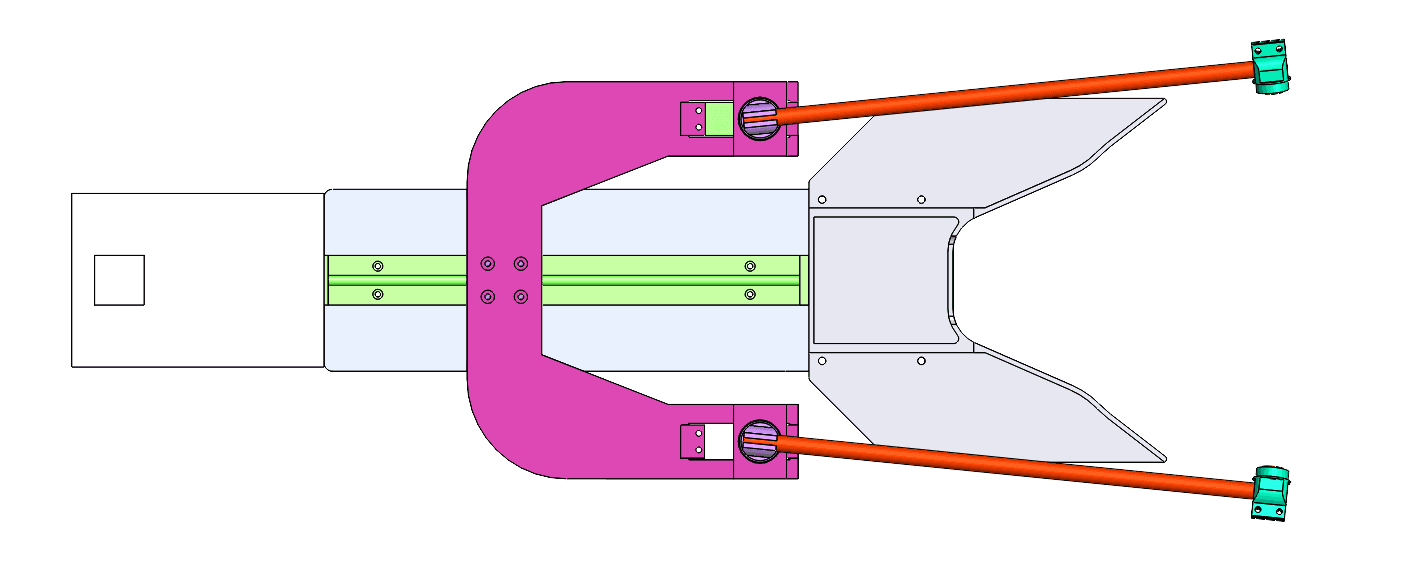
传统采样船用机械爪夹船,结构复杂、容易故障。他在船体两侧贴长条铁片,基站用强磁铁——船靠近时自动被吸住,基站再用步进电机驱动丝杆滑台把船拉到储水罐正下方,水泵把船里水抽到罐子里。整个机构没有"夹"的动作,更可靠。
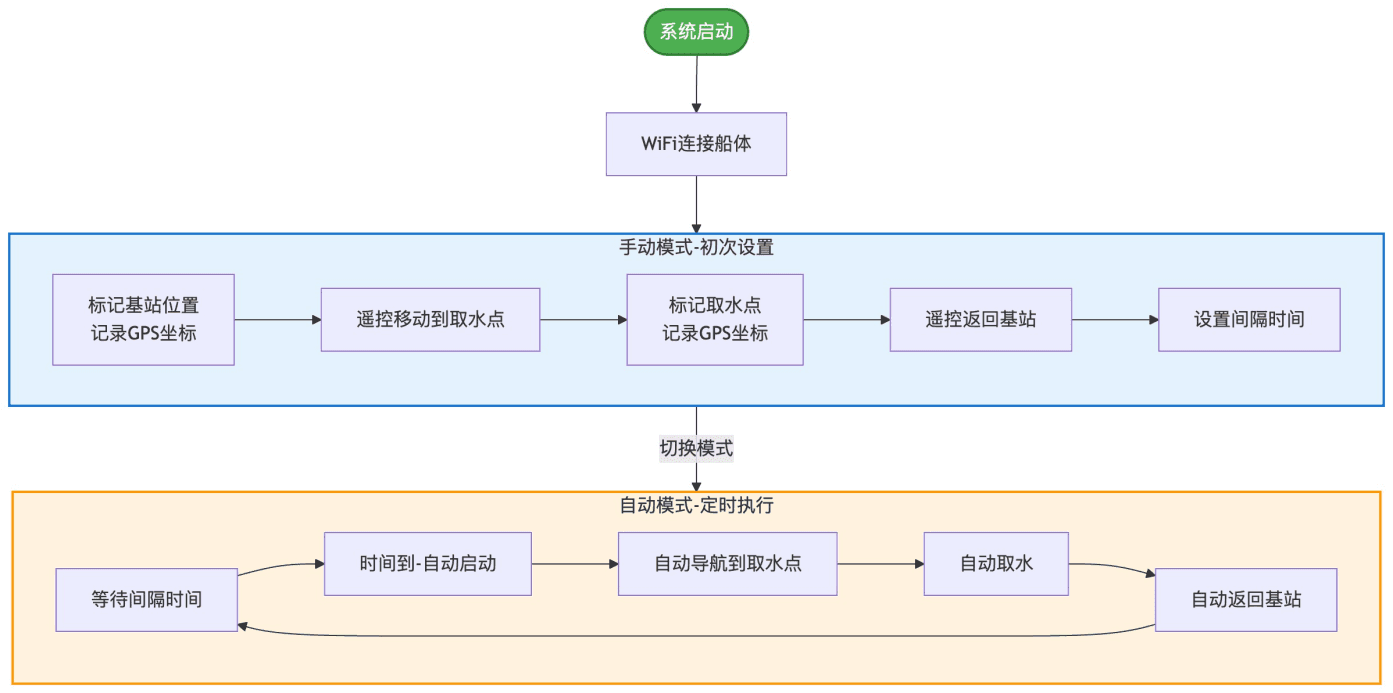
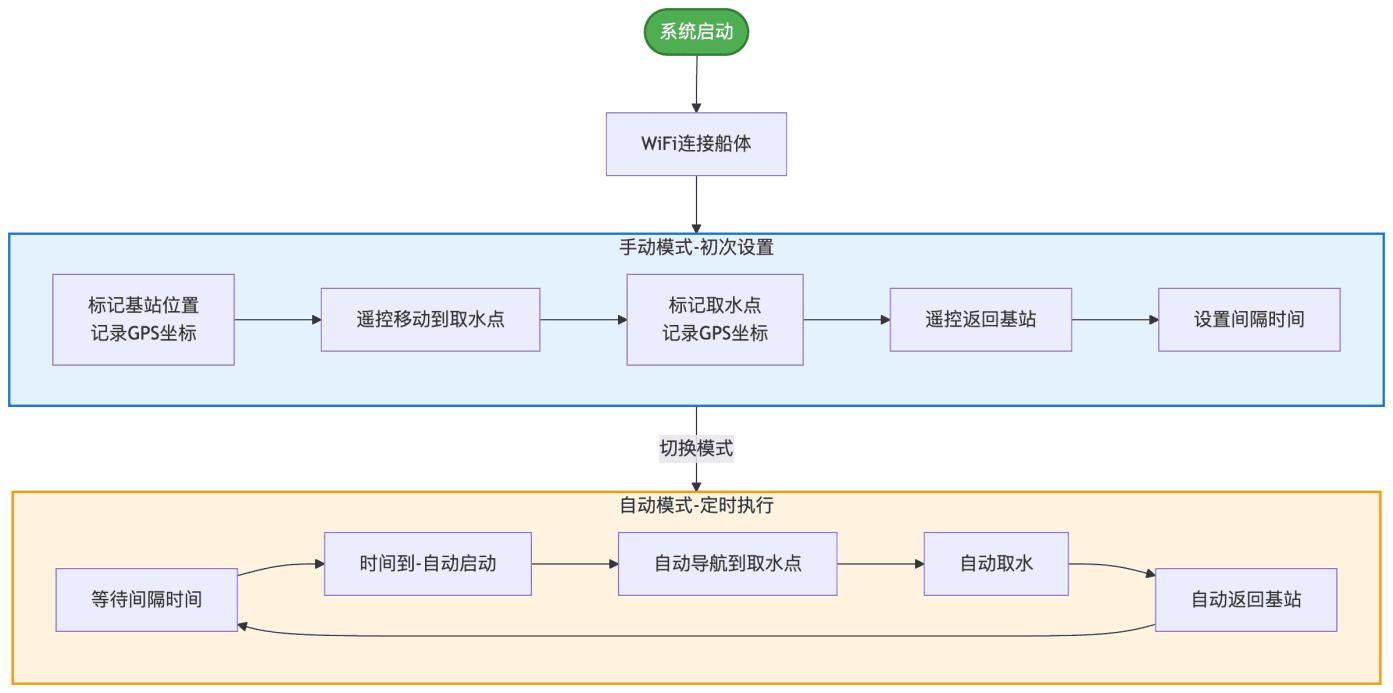
他想过用地图选取水点但开发难度太大。最终方案:用户通过 Web 后台手动遥控船到取水点 → 记录 GPS 经纬度 → 切自动模式 → 设定间隔(如每周一次)。到点船自动启动按 GPS 回标记的取水点采水、用 UWB 回基站对接。操作简单老师能直接上手。