
AI 姿态识别 · 医疗辅具 · 包容性设计
基于头部姿态控制的脑梗患者居家轮椅
袁同学 · 零一优创学员
3
项顶尖大奖
宋赛全国
金奖
北京唯二
初中组
宋庆龄少年儿童发明奖全国金奖(2025 年初中组北京唯二之一)北京市金鹏科技论坛一等奖海淀区青少年科技创新大赛一等奖
袁同学 · 零一优创学员
袁同学的邻居爷爷在一次脑梗发作后,手部精细动作出现了明显障碍,无法自主操作传统轮椅的手动推杆,只能依赖家人推行。看着这位曾经精神矍铄的老人被困在家里,袁同学心里觉得很不是滋味——他开始思考,能不能找到一种不依赖手部动作的控制方式?
他查阅资料发现,脑梗患者通常头部运动能力保留相对完好,这让他联想到了计算机视觉中的头部姿态估计技术。如果用摄像头实时追踪头部的俯仰、偏转和滚转角度,再将这些角度映射成轮椅的方向控制指令,理论上完全可行。
袁同学将这个设想和导师分享后,立刻开始了调研与原型验证。他走访了社区卫生中心的医生,了解脑梗患者的实际需求和安全边界,确保方案从一开始就朝着真正可用的方向发展,而不是停留在「技术演示」层面。
方案迭代明显,研究深度高,解决的问题直接,且具有典型性
— 项目亮点
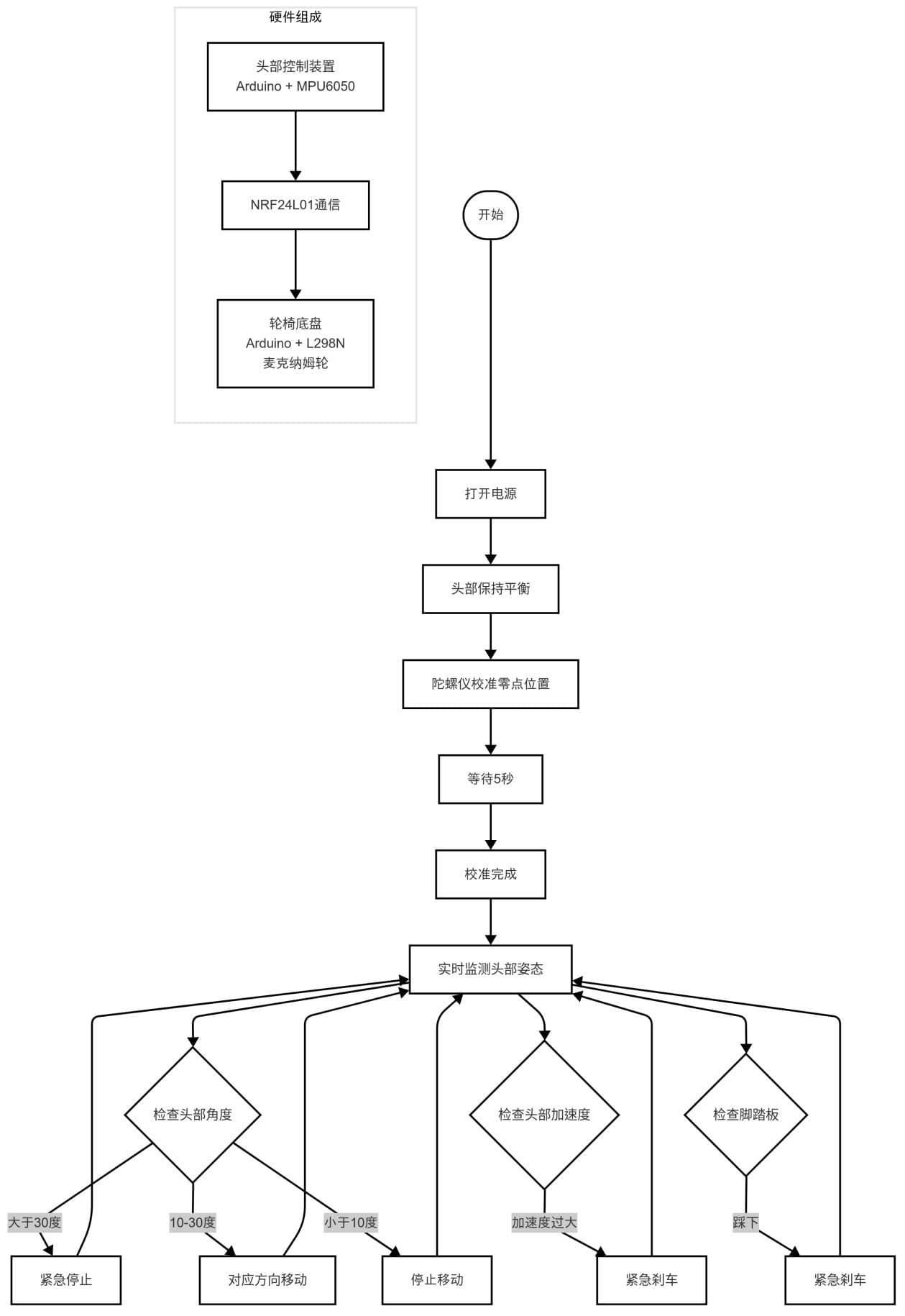
早期原型使用 MediaPipe Face Mesh 进行头部姿态估计,在标准计算平台上帧率稳定,但当系统集成到实际轮椅硬件时,推理延迟偶尔超过200毫秒,导致轮椅的响应出现明显滞后。袁同学对推理管线进行了优化,减少了不必要的中间计算,同时引入了卡尔曼滤波对姿态数据进行平滑处理,将延迟控制到了50毫秒以内,响应感明显改善。
患者在说话、吞咽、打喷嚏时,头部也会产生大幅度运动,这些运动极易被系统误判为控制指令,导致轮椅意外转向。袁同学设计了一套双重确认机制:只有当某一姿态角度超过阈值并持续超过0.5秒,系统才触发相应的移动指令。这个机制经过反复调整,最终将误触发率降低到了可以在居家环境安全使用的水平。
不同患者的头部控制能力差异很大,有的患者头部活动范围受限,有的则偶尔出现不自主抖动。袁同学在系统中增加了个性化参数配置界面,护理人员可以根据患者实际情况调整控制角度的死区范围、响应灵敏度和最大速度限制,让同一套系统能够适配不同状态的使用者。



— 袁同学
“答辩结束后,评委老师说这个项目让他想到了自己的父亲,那句话我听到现在还记得。”