N100 双芯片 · MediaPipe 姿态 · ToF 激光测距
基于计算机视觉与传感器融合的智能坐位体前屈测试系统
李同学 · 初一 · 零一优创学员
±0.3cm
测距精度
10×
效率提升
8 小时
连续工作
2025 金鹏市赛 · 西城青创赛一等奖
李同学 · 初一 · 零一优创学员
李同学在学校体测当志愿者时发现:每个学生测一次坐位体前屈要 3 分钟(量尺 + 记成绩 + 填表),不同测量员习惯不同导致数据偏差,事后没法追溯姿态是否标准。他想用计算机视觉做自动化,但调研发现纯树莓派方案性能不够(ARM 4 核 1.5GHz 跑 MediaPipe < 10fps),纯 PC + 单片机又太贵太大。
他最终选了 N100——一款专为工业应用设计的低功耗 x86 处理器,性能强、便携、刚刚商用化。N100 跑 Python + MediaPipe + 数据库,ESP32 负责传感器接驳和实时控制,两者用 USB 串口通信。
用 N100(工业级低功耗高性能)+ ESP32(硬件控制)的双芯片分工,比纯树莓派方案性能提升 4 倍、成本仅增加 34%,把体测从"人工读尺"做成全自动闭环。
— 项目亮点
他做了详细对比:树莓派 4B(ARM 4 核 1.5GHz)MediaPipe 帧率 < 10fps、整套约 1040 元;N100(x86 6 核 4.5GHz Boost)帧率 30fps+、整套约 1400 元——成本只贵 34% 但性能提升 4 倍以上。论证清楚后家长和老师都同意采购 N100。
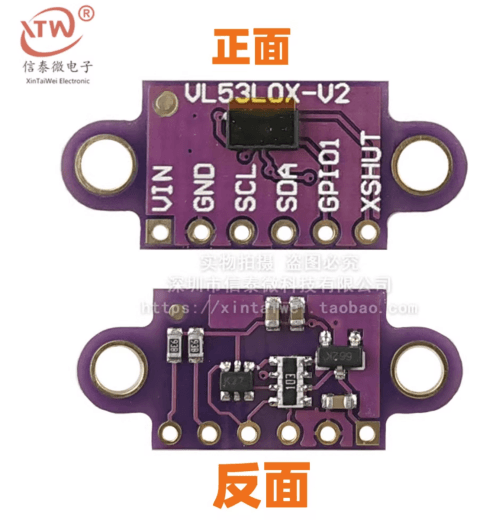
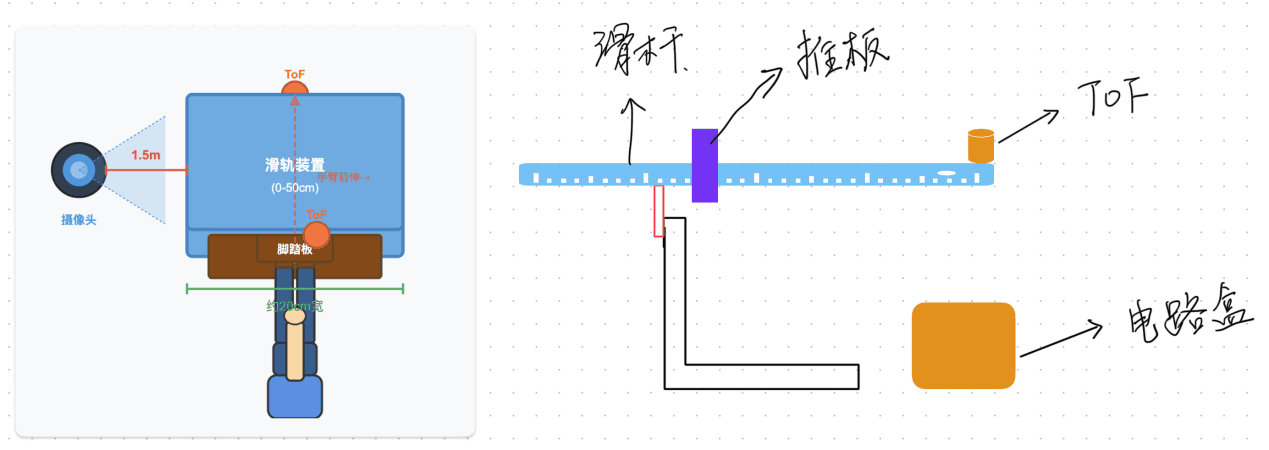
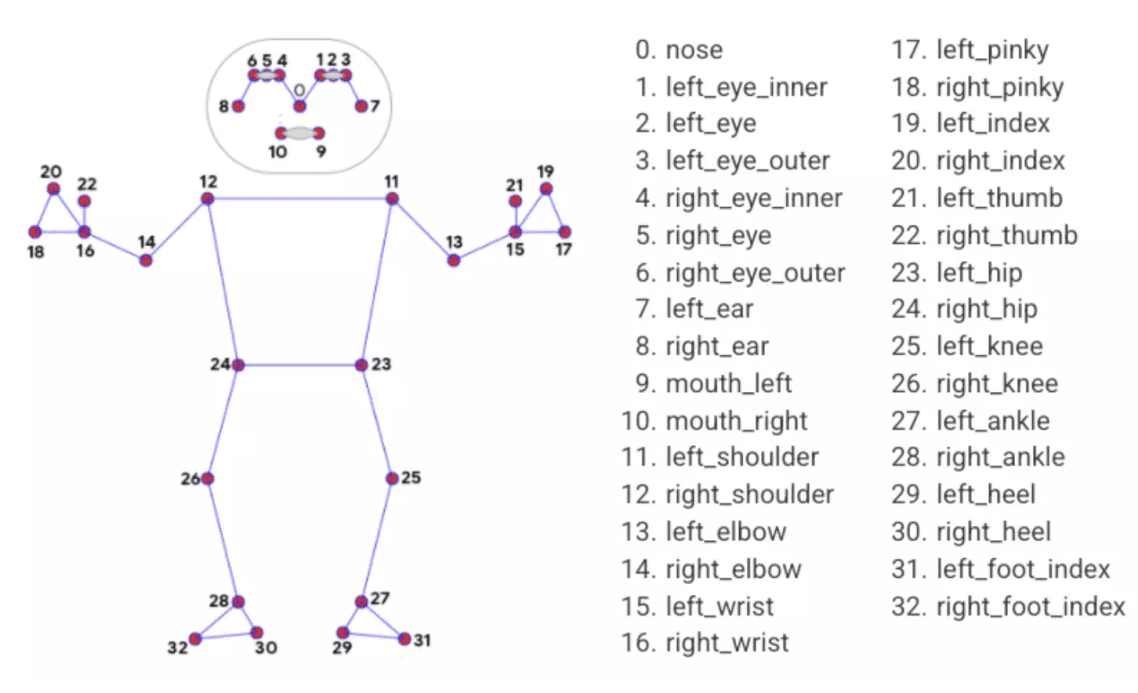
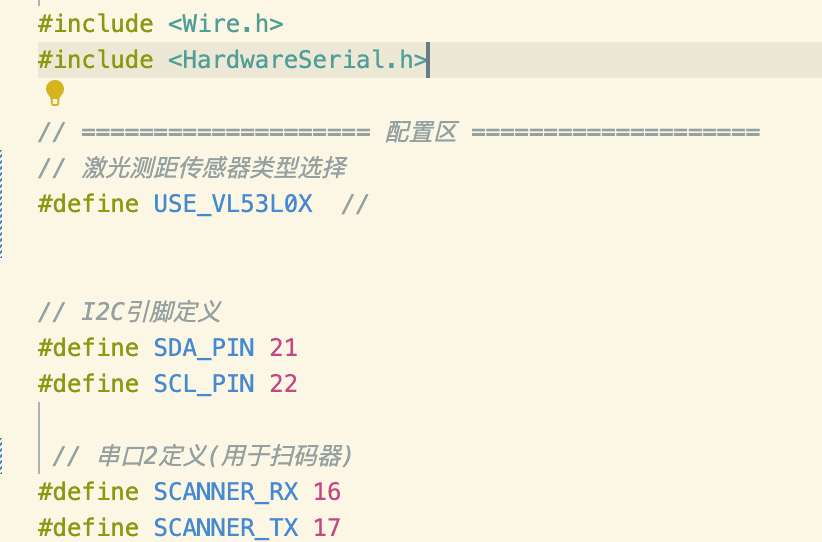
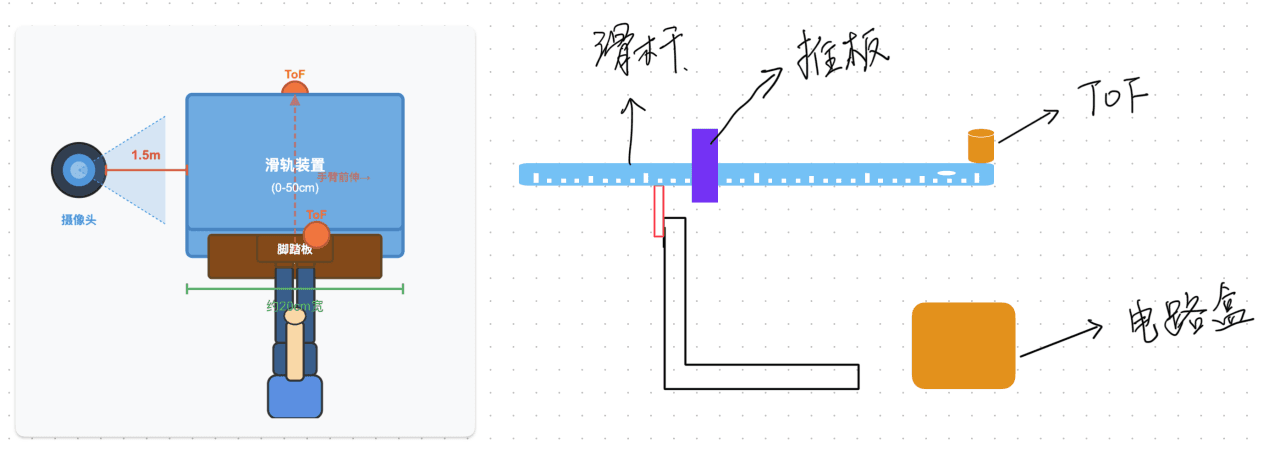
MediaPipe 在 N100 上检测 33 个人体关键点判断姿态是否标准(膝盖弯没弯、上身前倾角度),同时 ESP32 读 VL53L0X ToF 激光测距传感器算前倾距离(量程 200cm,精度 ±0.3cm)。两路数据按时间戳对齐,姿态合规才记录成绩。
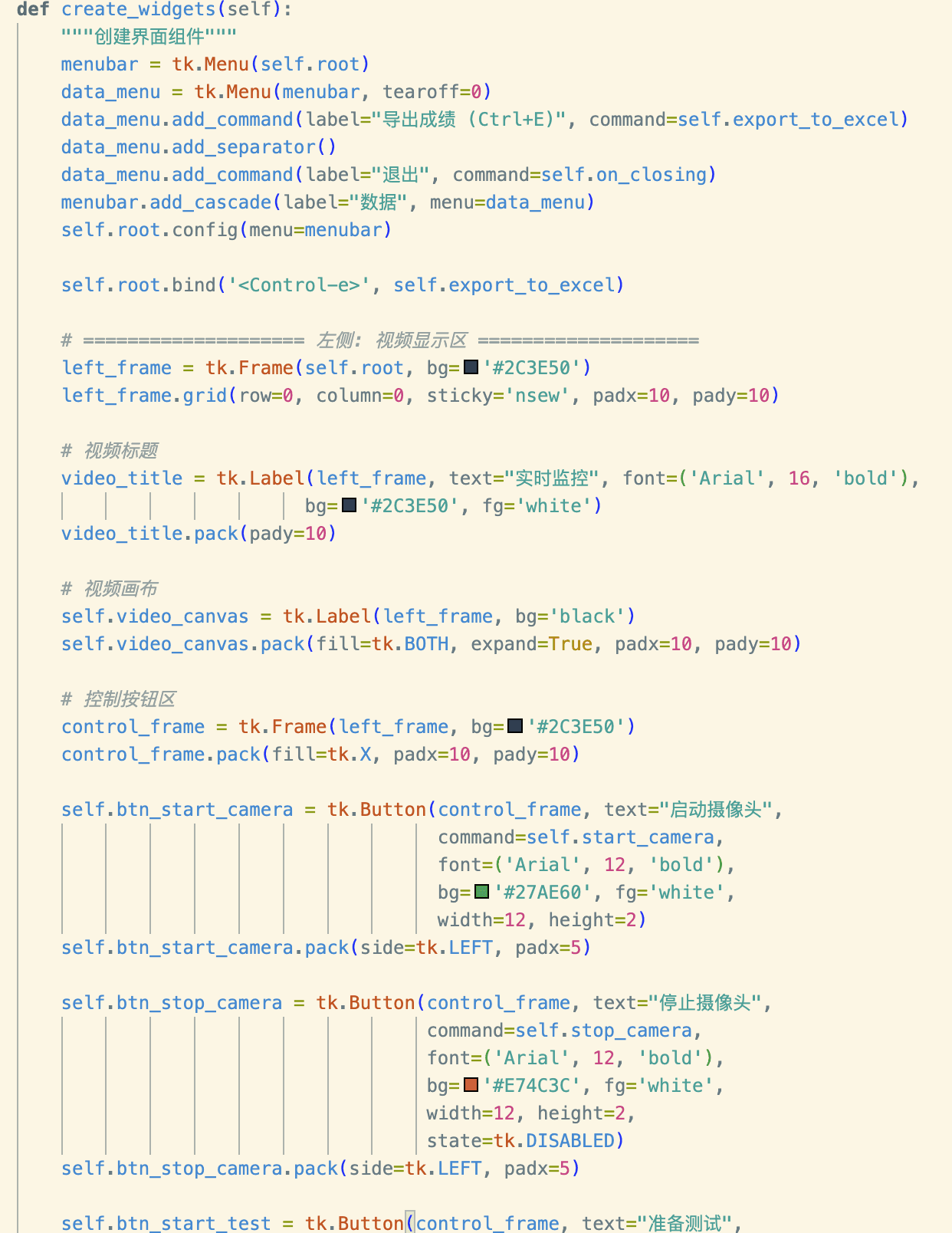
他给 ESP32 接了一个 USB 扫码器,学生测试前扫一下学生证(条形码 = 学号),系统自动调出学生信息、记录成绩、归档历史。N100 跑 SQLite 数据库 + Pygame 语音反馈("请准备……测试开始……完成,本次 18 厘米")。8 小时连续工作每日处理 1000+ 条数据。